Основы спутниковой навигации в альпинизме. Практическое применение систем спутниковой навигации GPS/ГЛОНАСС.
часть 1
В горовосхождении в настоящий момент широко применяются различные приборы спутниковой навигации, однако даже базовые теоретические основы работы таких приборов зачастую остаются «за скобками», что порождает различные «мифы» о спутниковой навигации как таковой и о возможностях ее использования в альпинизме. Мне хотелось провести небольшой «ликбез» в этой области, и такая возможность мне представилась в рамках Центральной Школы Инструкторов Московского региона (ЦШИМ), проходившей в период с октября по ноябрь 2015г. В результате был собран материал, который на мой взгляд может быть интересен не только в рамках ЦШИМ — поэтому думаю он имеет право быть размещенным здесь для общего обозрения.

Материал представлен в виде двух статей — первая часть — ниже представляет собой краткий экскурс по принципам работы систем спутниковой навигации, а вторая часть — практическое руководство по выбору и использованию приборов спутниковой навигации в альпинизме.
Заранее прошу простить многие существенные упрощения — статья ориентирована не на технических специалистов и призвана дать базовое понимание принципов работы систем спутниковой навигации и возможностей их использования.
Что такое спутниковая навигация
Спутниковая система навигации — комплексная электронно-техническая система, состоящая из совокупности наземного и космического оборудования, предназначенная для определения местоположения (географических координат и высоты) и точного времени, а также параметров движения (скорости и направления движения и т. д.) для наземных, водных и воздушных объектов.
Что такое геокоординаты
Широта́ — угол φ между местным направлением зенита и плоскостью экватора, отсчитываемый от 0° до 90° в обе стороны от экватора. Географическую широту точек, лежащих в северном полушарии, (северную широту) принято считать положительной, широту точек в южном полушарии — отрицательной. О широтах, близких к полюсам, принято говорить как о высоких, а о близких к экватору — как о низких.
Долгота́ — двугранный угол λ между плоскостью меридиана, проходящего через данную точку, и плоскостью начального нулевого меридиана, от которого ведётся отсчёт долготы. Долготу от 0° до 180° к востоку от нулевого меридиана называют восточной, к западу — западной. Восточные долготы принято считать положительными, западные — отрицательными.
Выбор нулевого меридиана произволен и зависит только от соглашения. Сейчас за нулевой меридиан принят Гринвичский меридиан, проходящий через обсерваторию в Гринвиче, на юго-востоке Лондона. В качестве нулевого ранее выбирались меридианы обсерваторий Парижа, Кадиса, Пулково и т. д.
В пределах географической оболочки применяется обычно 'высота над уровнем моря', отсчитываемая от уровня «сглаженной» поверхности — геоида. Такая система трёх координат оказывается ортогональной, что упрощает ряд вычислений. Высота над уровнем моря удобна ещё тем, что связана с атмосферным давлением.
Расстояние от земной поверхности (ввысь или вглубь) часто используется для описания места, однако не служит координатой.
Геоид и квазигеоид
Геоид (греч. geoeides, от ge – Земля и eidos – вид) – образованная основной уровенной поверхностью замкнутая фигура принимаемая за обобщенную поверхность Земли.
Поверхность геоида является одной из уровенных поверхностей потенциала силы тяжести. Эта поверхность, мысленно продолженная под материками, образует замкнутую фигуру, которую принимают за сглаженную фигуру Земли. Часто под геоидом понимают уровенную поверхность, проходящую через некоторую фиксированную точку земной поверхности у берега моря.
Понятие о геоиде сложилось в результате длительного развития представлений о фигуре Земли как планеты, а самый термин «геоид» предложен И. Листингом в 1873 г. От геоида отсчитывают нивелирные высоты. По современным данным, средняя величина отступления геоида от наиболее удачно подобранного земного сфероида составляет около ±50 м, а максимальное отступление не превышает ±100 м.
Высота геоида в сумме с ортометрической высотой определяет высоту Н соответственной точки над земным эллипсоидом. Поскольку распределение плотности внутри Земли с необходимой точностью неизвестно, высоту Н в геодезической гравиметрии и геодезии, согласно предложению М. С. Молоденского, определяют как сумму нормальной высоты и высоты квазигеоида.
Для точного определения поверхности геоида какой-либо точки необходимо выполнить комплекс измерений, непосредственно на поверхности геоида. Что практически не возможно, либо в соответствующей точке на физической поверхности Земли с учетом распределения масс в этом месте, что также не предоставляется возможным. По этой причине было предложено вместо поверхности геоида использовать квазигеоид, – поверхность близкую к поверхности геоида, определяемая только по результатам измерений на земной поверхности без привлечения данных по распределению масс.
Поверхность квазигеоида определена значениями потенциала силы тяжести на земной поверхности, и для изучения квазигеоида результаты измерений не нужно редуцировать внутрь притягивающей массы. Квазигеоид отступает от геоида в высоких горах на 2–4 м, на низменных равнинах – на 0,02-0,12 м, на морях и океанах поверхности геоида и квазигеоида совпадают.
Фигуру квазигеоида определяют методом астрономо-гравиметрического нивелирования или через предварительное определение возмущающего потенциала по материалам наземных гравиметрических съёмок и наблюдений за движением искусственных спутников Земли. Последние данные необходимы в связи с недостаточной гравиметрической изученностью некоторых областей Земли
Поверхность геоида, из-за ее сложности, математически никак не выражается, поэтому на ней нельзя решать геодезические задачи. Для решения таких задач взамен поверхности геоида принимают поверхность эллипсоида вращения – близкой по форме геоиду, но математически правильной поверхности, на которую можно перенести результаты измерений выполненных на физической поверхности Земли.
Для упрощения расчетов поверхности геоида и получения более точных результатов моделирования, математики применяли и применяют различные приемы (поверхность квазигеоида Молоденского, модель геоида EGM96, использующая сферические функции - гармоники и т. д.). Все эти математические приемы достаточно сложны. В последние годы заметный прогресс в получении реальной модели земной поверхности позволило получить развитие спутниковой системы измерений.
В настоящее время наиболее широкое использование получил геоцентрический эллипсоид WGS84 (World Goodetic System 1984). Он служит основой для измерения местоположений во всем мире. Система спутниковой навигации GPS сообщает координаты в системе эллипсоида WGS84 (World Goodetic System 1984).
Общеземной эллипсоид ориентируется в теле Земли согласно следующим условиям (определяемыми международными геодезическими организациями, которые организуются и направляются Международной ассоциацией геодезии, действующей по инициативе и в рамках Международного геодезического и геофизического союза):
- Малая полуось должна совпадать с осью вращения Земли.
- Центр эллипсоида должен совпадать с центром масс Земли.
- Сумма квадратов отступлений геоида от общеземного эллипсоида должна быть по всей Земле наименьшей из всех возможных.
Тем не менее, некоторые погрешности и отступления от реальной поверхности имеются при любых, применяемых в настоящее время, расчетах и измерениях.
Для геодезических работ рекомендуется использовать средний эллипсоид GRS80 (Geodetic Reference System 1980), принятый Генеральной Ассамблеей Международной ассоциацией геодезии в 1979 г
Принципы работы навигационных систем GPS/ГЛОНАСС
Глобальная система позиционирования GPS – это система, позволяющая с точностью не меньше нескольких десятков метров определить местоположение объекта, то есть его широту, долготу и высоту над уровнем моря, а также направление и скорость его движения. Кроме того, с помощью GPS можно определить время с точностью до 1 наносекунды.
GPS состоит из совокупности определённого количества искусственных спутников Земли и наземных станций слежения, объединённых в общую сеть. В качестве пользовательского оборудования служат индивидуальные GPS-приёмники, способные принимать сигналы со спутников и по полученной информации вычислять своё местоположение.
Орбитальная группировка
Вся система функционирует на основе орбитальных спутников. Они находятся на шести орбитах, высота которых составляет порядка 20000 километров.
Несмотря на то, что для нормальной работы системы достаточно 24-х спутников, на данный момент в орбитальную группировку входит 30 рабочих аппаратов. Это помогает добиться более точного определения координат.
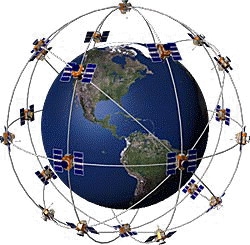
Все спутники передают данные на приемник посредством радиосигнала, транслирующегося на две частоты. Одна из них считается гражданской и имеет индекс L1 (1575.42 МГц), вторая же используется в основном военными и маркируется как L2 (1227.60 МГц). На основании данных, передаваемых с помощью L1, можно добиться точности позиционирования до 3-х метров. Если же наряду с «гражданской» L1 использовать еще и «военную» L2, то погрешность определения координат снижается до нескольких миллиметров. Однако такая точность необходима крайне редко, поэтому большинство современных коммерческих GPS- приемников используют исключительно L1. L2 же, помимо военных нужд, применяется еще и в дорогостоящем геодезическом оборудовании.
Спутники системы GPS находятся на различных круговых орбитах, плоскости которых разнесены по долготам через 60° и наклонены к плоскости экватора на 55°. Период обращения одного спутника составляет порядка 12 часов.
Регулярно спутники передают на Землю:
- Свой статус (сообщение об исправности или неисправности)
- Текущую дату
- Текущее время
- Данные альманаха (орбитальные данные всех спутников)
- Точное время отправки всей совокупности сообщений
- Бортовые эфемериды (расчётные координаты своего положения в этот момент времени)
Как определяется местоположение
Теоретически для определения местоположения необходимы данные с трех спутников. Попробуем разобраться, как происходит этот процесс. Допустим, нам известна величина расстояния от одного спутника до приемника. Зная ее, мы можем нарисовать окружность вокруг спутника, на краю которой и будет находиться наш приемник.

В случае двух спутников — приемник находится где то на пересечении двух сфер:

В случае трех спутников — возможно определить точную координату приемника как точку пересечения окружностей.

То есть теоретически координаты приемника можно определить по сигналам с трех спутников. В реальном случае для определения координат приемника используется четыре и более спутников.
Различные формы записи географических координат
- 21.36214, -157.95341
- N21.36214, W157.95341
- 21.36214°N, 157.95341°W
- 21°21.728'N, 157°57.205'W
- 21°21'43.7"N, 157°57'12.3"W
Форма записи координат в ГРАДУСАХ наиболее удобна для ручного ввода и совпадает с математической записью числа. Форма записи координат в ГРАДУСАХ И МИНУТАХ является предпочтительной во многих случаях, такой формат установлен по умолчанию в большинстве GPS навигаторов и стандартно используется в авиации и на море. Классическая форма записи координат в ГРАДУСАХ, МИНУТАХ И СЕКУНДАХ в действительности не находит большого практического применения.
Сколько километров в 1 градусе широты и долготы
1 градус ШИРОТЫ соответствует приблизительно 111 км.
1 градус ДОЛГОТЫ соответствует приблизительно 111 км на ЭКВАТОРЕ, при движении к полюсам соответствующее расстояние убывает пропорционально КОСИНУСУ ШИРОТЫ. Например, для Москвы 1 градус долготы 111 км * cos(55.7°) ≈ 62 км.
Из этих соотношений можно определить, например, что запись координат в градусах с 6 знаками после десятичной точки обеспечивает точность порядка 111 км * 0.000001 ≈ 0.1 метра на местности, заведомо избыточную.
Округление координат до целого числа секунд дает точность порядка 111 км / 3600 ≈ 30 метров.
Привязка к карте
На практике нас редко интересуют цифровые данные географических координат. Значительно чаще нас интересует расстояние и направление до тех или иных объектов и наше местоположение относительно них.
Данные о расположении различных географических объектов принято представлять в виде КАТРЫ.
Для привязки трехмерных географических координат к карте используются данные математической модели земной поверхности — ГЕОИДА. При этом система координат карты и системы навигации должна совпадать. Использование неверных систем координат может привести к значительным погрешностям.
Для работы со спутниковыми системами навигации рекомендуется модель WGS84.
В следующей части мы попробуем рассмотреть некоторые практические аспекты выбора и использования приборов спутниковой навигации применительно к альпинизму.
Надеюсь эта информация была Вам полезна и хочу еще раз выразить благодарность ЦШИМ - 2015, которая была организована:
Федерацией Альпинизма России (ФАР)

http://alpfederation.ru/
Федерацией Альпинизма и Скалолазания Москвы (ФАИСМ)

http://www.faism.ru/
И поддержана партнерами Центральной Школы Инструкторов для Москвы (ЦШИМ):

http://www.vento.ru/

http://baskcompany.ru/

http://alpindustria.ru/

http://www.decathlon.ru/

http://www.quechua.com.ru/

http://www.simond.com/
26
Комментарии:
Войдите на сайт или зарегистрируйтесь, чтобы оставить комментарий
а объяснения в виде наборов сфер вокруг спутников уже зубах вязнет
рекламы в тексте больше чем смысла :(
А то всё как-то мысью по древу
Меня например интересует реальная точность карманных навигаторов, чтобы они не были нафигаторами
НЕ ПОЗВОЛЯЕТ - ходить маршруты по навигатору)
Правда, я отношусь к упомянутым ниже "людям старой закалки" и не очень доверяю навигатору, если его данные противоречат тому, что я вижу. Но, да, один раз всей группой не поверили ему и ушли в соседнее ущелье:-).
Что же касается доверия к GPS в целом - тут есть еще вопрос надежности источника точек или треков. Сколько раз выяснялось, что точки, снятые предыдущей группой, не попадают на перевал. Ошибки прибора, перепутанные стандарты, просто опечатки, ошибочная привязка, искаженные карты и т.д. и т.п....
И, кстати, если, по навигатору ходить маршруты нельзя, а по карте и фоткам - старперство, то как же ходить-то?
Просто с навигатором в разы удобнее стало последние годы ходить. Особенно когда я освоил отрисовку собственных карт под походы. Долго ли накидать по планируемой нитке основные ориентиры в MapEdit и залить это всё в прибор? Поэтому до извлечения бумажной карты дело обычно не доходит. Разве что показать народу в группе обзорно где мы сейчас, куда идём и сколько ещё осталось, о чём чаще всего спрашивают )))
Но погода была терпимой, прошли и так, визуально.
Разумеется, и астронавигация, и GPS с Глонас - вещи хорошие.
Мало весят - даже с запасными батарейками.
И облегчат путь - да и жизнь могут спасти.
то работа с картой и камеральная, и на местности - по системе
географических координат никакого затруднении не вызывает.
Азимуты и расстояния просчитываются в общем быстро,
автоматически и без проблем. Практика нужна,
хорошо помогает спортивное ориентирование - вырабатывается
устойчивый навык автоматического определения углов,
расстояний и чтения местности.
Понятно, что с навигатором в руке - всё будет и точнее и быстрее.
Желательно иметь каждому, и + набор карт в кармане анорака.
Практическая точность обычно выше - условные 10м - наибольшее отклонение.
В общем на практике позволяет спуститься в тумане по треку и / или найти заброску.
P.S. Хотел извиниться, что статья целиком оказалась в ленте - исправлюсь...
P.P.S. Насчет карт и азимутов - согласен, но мы рассматриваем навигаторы в основном как экстренное средство ориентирования - в том числе (даже скорее - в основном) в условиях плохой видимости (туман, темнота, снег). При таком раскладе наличие навигатора не отменяет необходимость навыков ориентирования.
Иногда ездим в разные дальние страны. Так мы, наоборот, обязательно берем, кроме навигаторов, крупноформатную бумажную карту. Нам получается удобнее по ним видеть окружающую ситуацию в больших масштабах и прокладывать и менять маршрут. А уж ехать по нему, ладно, так и быть, можно по GPS.:-)
А молодежь, наверняка, уже легко делает все это, например, на экране моего Vista HCX с диагональю 5 дюймов. Меня бы кто так научил!
а насчет учиться с 5-дюймовым, так это дело привычки.Но вот своим иногда давал пояснения по привязанным картам, так у меня гораздо быстрее получалось на экране 17-дюймовом ноута, чем у них на 5-и дюймах даже с сенсором.Но это на базе.Представляю как с Sony VAIO и трекером по тропе... :-))
Кстати 5-дюймов для туристического многовато.Обычно поменьше.Да и на ярком солнце... :-(
(Если что, спутниковая навигация - это была тема моего дисера и сегодняшняя работа)
Кроме того, КП обычно в лесу, а там ужасная многолучёвость, поэтому скачков в координатах вряд ли в принципе удастся избежать. Листва многократко преломляет/искажает/отражает сигналы. В лесу - приходится мириться. 20 метров для большинства уехавших точек - я бы списал на многолучёвость. Отклонения в 50-100м - тоже возможно.
Если выйти в поле, то навигатор должен бить в одну точку с точностью в пару метров.
По геоиду/квазигеоиду:
Мне показалось, что слишком много наукообразных подробностей про мат.модели геоида и связанных с ним высот. Упомянутая система координат WGS-84 используется в GPS. В ГЛОНАСС используется своя система ПЗ-90, которая отличается от WGS-84. Отличия известны, есть формулы пересчёта. Возможно, что в двухсистемных навигаторах этот пересчёт делается внутри, и потребитель видит всё в WGS-84 и работает только с ней.
Про принципы функционирования:
"...определить время с точностью до 1 наносекунды". Сильно корректнее говорить про определение показаний какой-то внешней шкалы времени (шкала системы GPS/ГЛОНАСС) или смещение показаний одной шкалы (приёмника потребителя, в любом нав.приёмнике есть свой генератор=упрощённо часы, которые идёт несинхронно с часами системы).
Нехорошо написано, что частоты L1 - гражданская, а L2 - военная. Это не так. В GPS и ГЛОНАСС гражданские сигналы в диапазоне L2 уже вещаются спутниками. Просто все туристические навигаторы по определению одночастотные (диапазон L1). Профессиональные двухчастотные навигационные приёмники сильно больше, тяжелее и дороже. У них всегда выносные антенны. Есть куча приложений (мониторинг деформаций высотных сооружений, автоматические управление строительной и с/х техникой, местоопределение плавающих буровых платформ в шельфовой зоне, мониторинг движения тектонических плит, геодезическая привязка точек на земной поверхности и пр.), где не нужен компактный маленький девайс - там работают по двухчастотным измерениям.
Нехорошо написано, что при появлении дополнительно второй частоты сразу будут мм точность. Как уже сказано, в туристических навигаторах частота одна. Даже если всунуть вторую - всё равно погрешность будет на уровне метров. Потому что работают они по грубым однозначным измерениям псевдодальностей с с.к.о. шума измерений около 1 метра. Профессиональные двухчастотные навигационные приёмники используют второй тип измерений - неоднозначные, но высокоточные измерения фазы или псевдофазы (фазовые/псевдофазовые измерения), у них с.к.о. шума около 1 см, но они неоднозначны. При таких измерениях мм (или 1-2 см, что более типично) могут быть в двух случаях: 1. одномоментное относительное местоопределение методом RTK (есть первый базовый приёмник с известными координатами и второй приёмник потребителя с неизвестными, есть линия связи между ними, расстояние - не более десятков км), 2. высокоточное абсолютное местоопределение (PPP, Precise Point Positioning, я живу именно тут), тут может быть сантиметровая точность, но через некоторый период сходимости - от нескольких минут до нескольких часов. Поскольку турист - это всегда реал-тайм, то думать про сантиметры вообще не надо. Даже широкозонные системы дифференциальной коррекции (WAAS в северной америке, EGNOS - в европе, СДКМ - разворачивается в России) работают только по грубым однозначным измерениям, поэтому ошибка всё равно будет на метровом уровне.
Про отправляемую спутниками инфу:
Нехорошо написано, что спутники передают "Текущее время", " Точное время отправки всей совокупности сообщений" и "расчётные координаты своего положения в этот момент времени".
Текущее время - откуда спутнику его знать? Спутники это просто ретрансляторы того, что подсистема закладывает с земли. На спутнике есть генератор=упрощённо часы спутника. Подсистема управления отслеживает уход часов спутника от часов системы (от показаний шкалы системы ГЛОНАСС или GPS) и закладывает прогноз этого ухода на спутник, а спутник излучает это на землю. Спутник излучает непрерывно, в фазе модулирующего кода (одна из компонент сложного излучаемого сигнала) непрерывно закладывается фаза генератора на спутнике, т.е. его показания часов. Поскольку спутник летит со скоростью около 3 км/с, то бортовые эфемериды не могут в принципе содержать расчётные координаты спутников "в этот момент времени". Бортовые эфемериды ГЛОНАСС содержат расчётные координаты спутников на узловые моменты времени (то ли каждый час, то ли полчаса, не помню), а в GPS в бортовых эфемеридах сидят параметры модели движения, т.е. значения полиномиальных коэффициентов, которыми описываются меняющиеся во времени параметры кеплеровской модели движения (модель движения в GPS - модель в оскулирующих элементах, в ГЛОНАСС - дифференциальная модель).
Альманах - та же инфа, что и в бортовых эфемеридах, только сильно грубее, и на целую неделю, и сразу по всем спутникам.
Про определение местоположения:
Сфера вокруг спутника - это случай известного расстояния R между спутником и приёмником, что противоречит постановке задачи, т.к. при известных расстояниях должны быть известны координаты приёмника, т.е. и определять нечего. Нам же координаты приёмника не известны, поэтому и расстояния до спутников также не известны. Никаких сфер мы рисовать не можем.
Измерения псевдодальности от каждого спутника в навигаторе - это цифры. Есть математическая модель этого измерения, которая помимо неизвестного расстояния R содержит кучу смещений. Поэтому псевдодальность отличается от реальной дальности (расстояния R) на сколь угодно большие величины. Одно из таких смещений - это смещение показаний часов приёмника потребителя относительно показаний часов системы (ГЛОНАСС/GPS). Оно неизвестно, и без его определения невозможно найти координаты приёмника. Это и есть четвёртый оцениваемый параметр, который оценивается в навигаторе наряду с координатами потребителя. Если говорить о геометрической интерпретации - это будет четырёхмерный конус в четырёхмерном пространстве (по осям - 3 координаты и смещение часов приёмника). Рисовать такие дела как-то сложно, но можно рассмотреть случай плоской навигации, т.е. смотрим 2 координаты на плоскости и смещение часов потребителя. Тогда рисуем конус, его основание, опирается на окружность в координатах X, Y на плоскости, а вершина откладыается вдоль третьей ортогональной оси, где откладывается смещение показаний часов приёмника. Для плоской навигации достаточно 3 спутника, от каждого из них будет разный конус. Проекция точки пересечения трёх таких конусов на плоскость XY - это и есть местоположение потребителя.
Так что сферы грубо показывают только геометрические соотношения, а реально спутниковая навигация висит на пространственно-временных соотношениях. Так что 4 спутника минимум, т.к. 4 оцениваемых параметра, это закон. (Хотя рисунки со сферами есть во многих весьма серьёзных книгах, к сожалению)
Ну и ещё я бы добавил пояснение основной принципиальной разницы между ГЛОНАСС и GPS: в GPS используется кодовое разделение сигналов, а в ГЛОНАСС - частотное. То есть в каждом из частотных диапазонов L1 и L2 все спутники GPS излучают на одной и той же частоте, но в сигналах разные кодовые последовательности. А в ГЛОНАСС в каждом из частотных диапазонов L1 и L2 все спутники излучают на разных разных частотах, но одинаковые кодовые последовательности.
Если спуститься на землю обычных туристских применений, то в части альпинизма или горного туризма следует иметь в виду такое: на горном рельефе, например, на крутом склоне, закрыто будет практически полнеба. То есть будет дефицит сигналов от спутников (видно мало спутников), будет плохой геометрический фактор, и как следствие существенно ниже точность местоопределения. А если с другой от склона стороны ещё какая-нибудь большая горка или стенка, то может вообще отсутствовать местоопределение, либо будет огромная ошибка, вплоть до десятков метров или даже до сотни метров. Никого в горах такие ошибки не устраивают, поэтому и не рекомендуют горным туристам/альпинистам серьёзно относиться к показаниям навигатора в горах.
Update: в горах, в условиях города и при любом непростом окружении огромное влияние (=огромную ошибку) оказывает ошибка многолучёвости. От окружающих объектов спутниковые сигналы многократно отражаются, в итоге а навигатор приходит сумма переотражённых сигналов с искажёнными параметрами. Навигатору рвёт башню, ошибка десятки метров - это нормально при плохой в смысле многолучёвости обстановке. До сотни метров ошибка дойти из-за этого может легко. Поэтому в городе можно видеть, что машина едет рядом с дорогой, а не по дороге, ну и прочие детали.
Ух.
"Наибольший вклад в ошибку позиционирования (местоопределения) вносят атмосферные искажения (ионосфера и тропосфера)."
"Если выйти в поле, то навигатор должен бить в одну точку с точностью в пару метров." Это уже с учетом атмосферных искажений? То есть, если в поле точно не бьется это человеческий фактор?
"...определить время с точностью до 1 наносекунды". Сильно корректнее говорить про определение показаний какой-то внешней шкалы времени (шкала системы GPS/ГЛОНАСС) или смещение показаний одной шкалы (приёмника потребителя, в любом нав.приёмнике есть свой генератор=упрощённо часы, которые идёт несинхронно с часами системы)."
Читал, что 1нс это точность бортовых атомных часов, вроде как ученые, для точных измерений, чтобы не тратится на атомные часы применяют ЖПС. Интересно, какую точность можно при этом получить?
"Спутник излучает непрерывно, в фазе модулирующего кода (одна из компонент сложного излучаемого сигнала) непрерывно закладывается фаза генератора на спутнике, т.е. его показания часов."
Это аналоговая фаза? Непонятно, спутник то удаляется то приближается, фаза будет от этого изменятся или это как то можно учесть?
Извините что гружу, везде или стандартные копипасты или суровая наука, до сих пор в голове не уложилось, как это все работает.
Атмосферные искажения есть всегда, их нельзя учитывать или не учитывать, если мы говорим про простой туристический навигатор (навигатор нас не спрашивает и применяет простую одночастотную модель компенсации атмосферных ошибок, она плохо работает, ионосферная ошибка компенсируется примерно на 50%. если ионосферная ошибка 10 метров, то нескомпенсированный остаток в 5 метров пролезет в ошибку по координатах). В среднем (!) атмосфера обычно не даёт ошибку больше нескольких метров. Поэтому если всё хорошо - в поле будет пара метров. Если ионосфера нестабильна - не будет. Человеческий фактор вроде бы исключён, если мы просто стоим в поле с навигатором. Или, может, я не понял, что имеется в виду под человеческим фактором. Бывают просто перебои в ГЛОНАСС и в GPS, когда точность бортовых эфемерид плохая - тогда и точность местоопределения падает. Наверное, это можно назвать человеческим фактором. Если говорить и предельносй точности туристических навигаторов вообще - она ограничена шумом измерений псевдодальности, это около метра.
>Читал, что 1нс это точность бортовых атомных часов, вроде как ученые, для точных >измерений, чтобы не тратится на атомные часы применяют ЖПС. Интересно, какую >точность можно при этом получить?
Суточная нестабильность бортовых генераторов примерно 1*10^(-13) (Умножим на 86400 - поймём, на сколько часы уходят в сутки). Взаимная синхронизация бортовых генераторов разных спутников примерно 8 наносекунд. Если использовать GPS/ГЛОНАСС для синхронизации разных шкал времени на земле, то это даёт точность порядка 50-200 нс.
>Это аналоговая фаза? Непонятно, спутник то удаляется то приближается, фаза будет >от этого изменятся или это как то можно учесть?
>Извините что гружу, везде или стандартные копипасты или суровая наука, до сих >пор в голове не уложилось, как это все работает.
Фаза - она в принципе аналоговая. Есть такое краткое и ёмкое определение: "фаза - это доля периода" (Поваляев А.А.). Поэтому фаза генератора на спутнике - аналоговая. И этой фазой определяется, в какой момент формируются те или иные символы модулирующего кода, который замешивается в сложный излучаемый сигнал.
Приближается спутник или удаляется - совершенно не важно. Генератор - это часы, которые непрерывно тикают, т.е. его фаза постоянно набегает. Однозначно измерить фазу можно от 0 до 2Пи. Чтобы разрешить неоднозначность в измерениях псевдодальностей передаются специальные метки времени и оцифровки меток времени. Поэтому принято считать, что измерения псевдодальности однозначны. А вот неоднозначные измерения псевдофазы - это измерения по фазе несущего высокочастотного колебания, там метку времени передать в принципе уже нельзя, поэтому упомянутые выше методы RTK и PPP - это свой мир, где борются с этой неоднозначностью всякими методами. Как бы в измерении сидит неизвестное целое число циклов.